ARVR检测
ARVR检测 基础介绍
定位追踪是“空间计算”概念中至关重要的一环,通过追踪用户的位置和姿态,实现用户在虚拟环境中的自由移动和交互。
SLAM 技术实现了物体在空间中的定位。AR技术是通过带有视觉传感器的设备实现在物理真实场景中添加虚拟信息,实现现实和虚拟场景的交互。为了实现很好的逼真效果,需要固定虚拟图像相对真实环境中的位置,同时需要精确估计出移动设备相对空间的位置变化。
VR技术则是通过VR HMD投射虚拟信息,给人身临其境的感觉,将使用者在实际空间中的移动反映到虚拟空间上可以很大程度地提高交互体验,通过追踪使用者佩戴头盔的位置可以实现这一效果,实现头盔空间定位的方式可以分为 Outside-in 方案和 Inside-out 方案,前者使用过外部辅助设备实现定位,后者则使用HMD自身传感器实现定位,由于outside-in方案使用场景受限,inside-out成为主流方案。
DoF 指“自由度”,表达物体在空间内运动的不同基本方式,几乎所有的空间运动都能被拆解成6种基本运动方式。3DoF 一般指的是 3 个旋转运动:允许用户头部处于一个固定位置时,可以前后翻转、左右摇摆、水平转动。3DoF 设备一般用来看电影看直播,但当身体需要移动并且需要与虚拟或现实场景产生交互时,3DoF显得有点捉襟见肘了,此时更多维度的6DoF需求应运而生。6DoF 相比 3DoF 包括额外的 3 个轴的位移运动,允许用户身体在 X、Y、Z 三个轴的移动,即能感应用户身体的前进后退,左右移动,下蹲上跳。

3DoF 设备的最大缺点是它们不太适合沉浸式内容,用户很难与虚拟环境进行无缝交互,这不仅会降低沉浸感和使用乐趣,还有可能引发晕动症。因此3DoF 设备的总体趋势正在逐步下降,越来越多的厂商支持更高交互能力的 6DoF 设备。
VIO(visual-inertial odometry)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IMU数据实现SLAM的算法,根据融合框架的区别又分为紧耦合和松耦合,松耦合中视觉运动估计和惯导运动估计系统是两个独立的模块,将每个模块的输出结果进行融合,而紧耦合则是使用两个传感器的原始数据共同估计一组变量,传感器噪声也是相互影响的,紧耦合算法上比较复杂,但充分利用了传感器数据,可以实现更好的效果。
XR空间定位测试系统

系统组成
设备:
测试软件:
测量能力
| 空间定位检测关注指标 | |
| 追踪精度 | 绝对轨迹误差 (ATE) |
| 相对轨迹误差 (RTE) | |
| 初始化 | 初始化时间 |
| 尺寸误差 | |
| 初始化质量 | |
| 稳定性 | 抖动误差 |
| 抖动率 | |
| 漂移误差 | |
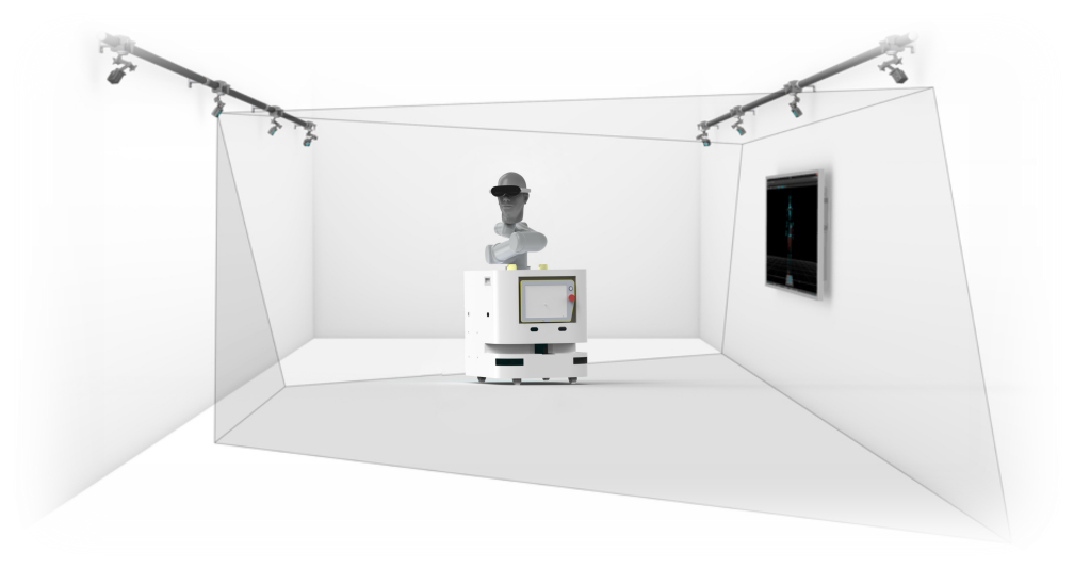
测评环境

Contact us

021-56635528

info@light-sci.com

上海市普陀区金沙江路1628号绿洲中环1号楼2605室



Youtube

微信公众号